W1. Векторы, векторные пространства, линейная независимость, базис и размерность
1. Краткое содержание
1.1 Введение в векторы
Вектор — базовый математический объект, у которого есть и длина (величина, magnitude), и направление (direction). Он отличается от скаляра (scalar): скаляр задаётся одним числом (как температура или модуль скорости), у него есть величина, но нет направления. Полезно думать о векторе как об инструкции «пройти столько-то в таком-то направлении».
Векторы можно задавать по-разному:
1.1.1 Геометрическое представление
Как направленный отрезок (стрелка) в пространстве: длина стрелки — величина, направление стрелки — направление вектора. Важно: вектор не привязан к начальной точке; две стрелки одинаковой длины и направления задают один и тот же вектор, где бы они ни лежали. Это делает векторы «свободными» геометрическими объектами.
1.1.2 Алгебраическое представление
Как упорядованный набор чисел — компонент (components). Например, на плоскости \(\mathbb{R}^2\) вектор задаётся двумя компонентами \((x, y)\), в пространстве \(\mathbb{R}^3\) — тремя \((x, y, z)\); они совпадают с проекциями на координатные оси. В линейной алгебре векторы часто записывают столбцами (column vectors): \[ \vec{v} = \begin{pmatrix} x \\ y \end{pmatrix} \] Строка-вектор (row vector) пишется как \((x, y)\). Это не то же самое, что столбец, но переход между формами даёт операция транспонирования (transpose): \(\begin{pmatrix} x \\ y \end{pmatrix}^T = (x, y)\).
1.1.3 Обозначения
Векторы обозначают полужирными строчными (v), буквой со стрелкой (\(\vec{v}\)) или концами отрезка (\(\vec{AB}\) — от точки A к точке B). Точки — заглавными буквами (A, B). Скаляры — обычными строчными (\(c\), \(k\), \(\alpha\)).
1.2 Основные операции с векторами
Для векторов введены стандартные арифметические операции, с ними можно работать алгебраически.
1.2.1 Сложение векторов
Складывают покомпонентно. Геометрически это правило треугольника (tip-to-tail): конец первого вектора совмещают с началом второго; сумма идёт от начала первого до конца второго. \[ \vec{u} + \vec{v} = \begin{pmatrix} u_1 \\ u_2 \end{pmatrix} + \begin{pmatrix} v_1 \\ v_2 \end{pmatrix} = \begin{pmatrix} u_1 + v_1 \\ u_2 + v_2 \end{pmatrix} \]
1.2.2 Умножение на скаляр
Каждую компоненту умножают на число; вектор масштабируется (scales): меняется длина, при положительном множителе направление то же, при отрицательном — разворачивается. Коэффициент 2 удваивает длину, \(-0.5\) — уполовинивает и меняет ориентацию. \[ c\vec{v} = c\begin{pmatrix} v_1 \\ v_2 \end{pmatrix} = \begin{pmatrix} cv_1 \\ cv_2 \end{pmatrix} \]
1.2.3 Вычитание векторов
\(\vec{u} - \vec{v}\) — это \(\vec{u} + (-1)\vec{v}\). Геометрически \(\vec{u} - \vec{v}\) направлен от конца \(\vec{v}\) к концу \(\vec{u}\) (если отложить оба от общего начала). \[ \vec{u} - \vec{v} = \begin{pmatrix} u_1 \\ u_2 \end{pmatrix} - \begin{pmatrix} v_1 \\ v_2 \end{pmatrix} = \begin{pmatrix} u_1 - v_1 \\ u_2 - v_2 \end{pmatrix} \]
1.3 Длина вектора и нормировка
1.3.1 Норма вектора
Норма (norm) — неотрицательное число, длина вектора; для \(\vec{v}\) пишут \(||\vec{v}||\), считают по обобщённой формуле Пифагора по компонентам. \[ ||\vec{v}|| = \sqrt{v_1^2 + v_2^2 + \dots + v_n^2} \]
1.3.2 Единичные векторы
Единичный вектор (unit vector) — вектор с нормой 1; удобен, чтобы задать чистое направление. Нормировать (normalize) ненулевой вектор — разделить его на свою норму. \[ \hat{u} = \frac{\vec{v}}{||\vec{v}||} \]
1.3.3 Стандартные орты
В декартовой системе в \(\mathbb{R}^3\):
- \(\vec{i} = \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix}\) (ось \(x\))
- \(\vec{j} = \begin{pmatrix} 0 \\ 1 \\ 0 \end{pmatrix}\) (ось \(y\))
- \(\vec{k} = \begin{pmatrix} 0 \\ 0 \\ 1 \end{pmatrix}\) (ось \(z\)) Любой вектор в \(\mathbb{R}^3\) раскладывается так: \(\begin{pmatrix} a \\ b \\ c \end{pmatrix} = a\vec{i} + b\vec{j} + c\vec{k}\).
1.3.4 Расстояние между точками
Расстояние между \(P\) и \(Q\) — норма вектора \(\vec{PQ} = Q - P\). \[ d(P, Q) = ||\vec{PQ}|| = ||Q - P|| = \sqrt{(q_1-p_1)^2 + (q_2-p_2)^2 + \dots} \]
1.4 Векторные пространства и подпространства
1.4.1 Векторное пространство
Векторное пространство (vector space) — множество объектов (векторов), на котором заданы сложение и умножение на скаляры из поля; выполняются десять аксиом (axioms), гарантирующих «обычное» поведение.
Пусть u, v, w — векторы в пространстве \(V\), \(c\) и \(d\) — скаляры. Аксиомы:
- Сложение:
- Замкнутость по сложению (Closure under Addition): \(\mathbf{u}+\mathbf{v}\in V\).
- Коммутативность (Commutativity): \(\mathbf{u}+\mathbf{v}=\mathbf{v}+\mathbf{u}\).
- Ассоциативность (Associativity): \((\mathbf{u}+\mathbf{v})+\mathbf{w}=\mathbf{u}+(\mathbf{v}+\mathbf{w})\).
- Нулевой вектор (zero vector): существует единственный \(\mathbf{0}\): \(\mathbf{u}+\mathbf{0}=\mathbf{u}\).
- Противоположный вектор (additive inverse): для каждого \(\mathbf{u}\) есть \(-\mathbf{u}\): \(\mathbf{u}+(-\mathbf{u})=\mathbf{0}\).
- Умножение на скаляр:
- Замкнутость по умножению на скаляр (Closure under Scalar Multiplication): \(c\mathbf{u}\in V\).
- Дистрибутивность по векторам: \(c(\mathbf{u}+\mathbf{v})=c\mathbf{u}+c\mathbf{v}\).
- Дистрибутивность по скалярам: \((c+d)\mathbf{u}=c\mathbf{u}+d\mathbf{u}\).
- Ассоциативность по скалярам: \((cd)\mathbf{u}=c(d\mathbf{u})\).
- Единичный скаляр: \(1\mathbf{u}=\mathbf{u}\).
- Примеры векторных пространств:
- \(\mathbb{R}^n\): все \(n\)-мерные вещественные столбцы.
- \(P_n\): многочлены степени не выше \(n\); например, \(3x^2-x+5\in P_2\).
- Пространство непрерывных функций (на интервале).
- Не-пример: первый квадрант \(\mathbb{R}^2\) (\(x\ge0\), \(y\ge0\)) не векторное пространство: нарушается замкнутость при умножении на отрицательный скаляр (вектор уходит в третий квадрант).
1.4.2 Подпространство
Подпространство (subspace) — подмножество векторного пространства, само являющееся векторным пространством с теми же операциями. Тест на подпространство (Subspace Test) для \(H\subseteq V\):
- \(\mathbf{0}\in H\).
- Замкнутость по сложению: из \(\vec{u},\vec{v}\in H\) следует \(\vec{u}+\vec{v}\in H\).
- Замкнутость по умножению на скаляр: из \(\vec{u}\in H\), \(c\) — скаляр, следует \(c\vec{u}\in H\).
- Типичные примеры: любая прямая или плоскость через начало в \(\mathbb{R}^3\); нуль-пространство (null space) матрицы \(A\) — множество решений \(A\vec{x}=\vec{0}\) (всегда подпространство).
1.4.3 Центроид треугольника
Для вершин \(A,B,C\) центроид (centroid, центр масс) — единственная точка \(G\), для которой \(\vec{GA}+\vec{GB}+\vec{GC}=\vec{0}\). Радиус-вектор: \(\vec{OG}=\frac{1}{3}(\vec{OA}+\vec{OB}+\vec{OC})\). Центроид лежит внутри треугольника.
1.5 Линейные комбинации, линейная оболочка и базис
1.5.1 Линейная комбинация и span
Линейная комбинация (linear combination): \(\vec{w}=c_1\vec{v}_1+c_2\vec{v}_2+\dots\). Линейная оболочка (span) набора — множество всех таких комбинаций; span всегда подпространство. Например, span двух неколлинеарных векторов в \(\mathbb{R}^3\) — плоскость через начало.
1.5.2 Линейная независимость
Набор линейно независим (linearly independent), если ни один вектор не выражается через остальные; нулевая комбинация возможна только при нулевых коэффициентах (trivial solution).
1.5.3 Линейная зависимость
Набор линейно зависим (linearly dependent), если хотя бы один вектор — линейная комбинация остальных. Геометрически: два вектора на одной прямой; три — в одной плоскости.
1.5.4 Базис и размерность
Базис (basis) — линейно независимый набор, натягивающий всё пространство (spans). Число векторов в любом базисе одно и то же — размерность (dimension). У \(\mathbb{R}^3\) размерность 3; стандартный базис \(\{\vec{i},\vec{j},\vec{k}\}\).
2. Определения
- Вектор: объект с длиной и направлением.
- Скаляр: величина одним числом.
- Норма: \(||\vec{v}||\).
- Единичный вектор: \(||\vec{u}||=1\), задаёт направление.
- Стандартные орты: \(\vec{i},\vec{j},\vec{k}\).
- Векторное пространство: векторы и скаляры с десятью аксиомами.
- Подпространство: подмножество, замкнутое по операциям.
- Нуль-пространство (Null space): решения \(A\vec{x}=\vec{0}\); всегда подпространство.
- Центроид: точка пересечения медиан; радиус-вектор — среднее радиус-векторов вершин.
- Линейная комбинация: сумма векторов с числовыми коэффициентами.
- Span: все линейные комбинации данного набора (подпространство).
- Линейная независимость: нет «лишних» направлений.
- Линейная зависимость: есть избыточность.
- Базис: независимый span всего пространства.
- Размерность: число векторов в базисе.
3. Формулы
- Сложение: \[ \vec{u} + \vec{v} = \begin{pmatrix} u_1 + v_1 \\ u_2 + v_2 \end{pmatrix} \]
- Умножение на скаляр: \[ c\vec{v} = \begin{pmatrix} cv_1 \\ cv_2 \end{pmatrix} \]
- Вычитание: \[ \vec{u} - \vec{v} = \begin{pmatrix} u_1 - v_1 \\ u_2 - v_2 \end{pmatrix} \]
- Норма в \(\mathbb{R}^n\): \[ ||\vec{v}|| = \sqrt{v_1^2 + v_2^2 + \dots + v_n^2} \]
- Расстояние \(P,Q\): \(d(P, Q) = ||Q - P||\)
- Нормировка: \[ \hat{u} = \frac{\vec{v}}{||\vec{v}||} \]
- Середина отрезка: \[ \vec{OM} = \frac{1}{2}(\vec{OB} + \vec{OC}) \]
- Центроид: \[ \vec{OG} = \frac{1}{3}(\vec{OA} + \vec{OB} + \vec{OC}) \]
- Линейная независимость: \(c_1\vec{v_1} + \dots + c_n\vec{v_n} = \vec{0}\) только при \(c_1=\dots=c_n=0\).
- Базис в \(\mathbb{R}^n\) через определитель: \(\det([\vec{v_1} \dots \vec{v_n}]) \neq 0\).
- Проекция \(\vec{a}\) на \(\vec{b}\): \[ \text{proj}_{\vec{b}}\vec{a} = \frac{\vec{a} \cdot \vec{b}}{||\vec{b}||^2} \vec{b} \]
- Отражение относительно прямой с направлением \(\vec{b}\): \[ \text{ref}_{\vec{b}}\vec{a} = 2 \cdot \text{proj}_{\vec{b}}\vec{a} - \vec{a} \]
4. Примеры
4.1. Точка на прямой AB (Лаба 1, Задание 1)
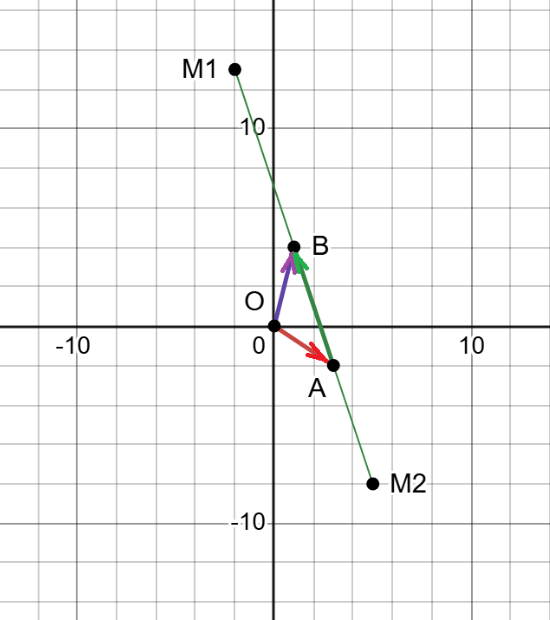
Даны \(A(3, -2)\) и \(B(1, 4)\). Точка \(M\) лежит на прямой \(AB\) так, что \(|AM| = 3|AB|\). Найдите координаты \(M\), если:
- \(M\) и \(B\) по одну сторону от \(A\).
- \(M\) и \(B\) по разные стороны от \(A\).
Показать решение
Пусть \(\vec{a},\vec{b},\vec{m}\) — радиус-векторы точек \(A,B,M\). Дано соотношение длин \(|\vec{AM}|\) и \(|\vec{AB}|\).
- Случай 1: \(M\) и \(B\) по одну сторону от \(A\). Тогда \(\vec{AM}\) и \(\vec{AB}\) сонаправлены: \(\vec{AM} = 3\vec{AB}\), откуда \(\vec{m}-\vec{a}=3(\vec{b}-\vec{a})\) и \(\vec{m}=3\vec{b}-2\vec{a}\).
- \(x = 3(1) - 2(3) = -3\), \(y = 3(4) - 2(-2) = 16\).
- Ответ: \(M_1 = (-3, 16)\).
- Случай 2: по разные стороны. Тогда \(\vec{AM} = -3\vec{AB}\), \(\vec{m}=\vec{a}-3(\vec{b}-\vec{a})=4\vec{a}-3\vec{b}\).
- \(x = 4(3) - 3(1) = 9\), \(y = 4(-2) - 3(4) = -20\).
- Ответ: \(M_2 = (9, -20)\).
4.2. Центроид треугольника (Лаба 1, Задание 2)
На плоскости \(\triangle ABC\) найдите \(G\), для которой \(\vec{GA} + \vec{GB} + \vec{GC} = \mathbf{0}\). Существуют ли такие точки вне треугольника?
Показать решение
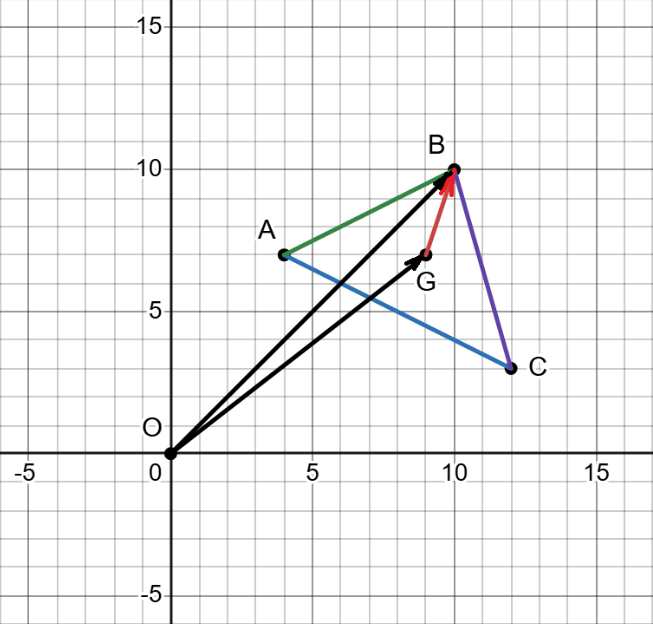
- Пусть \(\vec{a},\vec{b},\vec{c},\vec{g}\) — радиус-векторы. Тогда \((\vec{a}-\vec{g})+(\vec{b}-\vec{g})+(\vec{c}-\vec{g})=\mathbf{0}\).
- \(\vec{a}+\vec{b}+\vec{c}=3\vec{g}\), значит \(\vec{g}=\frac{\vec{a}+\vec{b}+\vec{c}}{3}\) — центроид (centroid / центр масс).
- Центроид всегда внутри треугольника.
4.3. Является ли набор базисом (Лаба 1, Задание 3a)
Проверьте, образует ли набор базис \(\mathbb{R}^2\); поясните: \(\left\{ \begin{bmatrix} 1 \\ 0 \end{bmatrix} + \begin{bmatrix} 0 \\ 2 \end{bmatrix} \right\}\)
Показать решение
Сложим: \(\begin{bmatrix} 1 \\ 2 \end{bmatrix}\) — один вектор. Его span — прямая, не вся плоскость \(\mathbb{R}^2\).
Ответ: не базис \(\mathbb{R}^2\) (не хватает размерности / не покрывает всё пространство).4.4. Является ли набор базисом (Лаба 1, Задание 3b)
\(\left\{ \begin{bmatrix} 1 \\ 0 \end{bmatrix}, \begin{bmatrix} 0 \\ 2 \end{bmatrix} \right\}\)
Показать решение
Два вектора в \(\mathbb{R}^2\): проверим \(c_1\begin{bmatrix}1\\0\end{bmatrix}+c_2\begin{bmatrix}0\\2\end{bmatrix}=\mathbf{0}\) — только тривиальное решение, значит линейно независимы. Их два — как раз \(\dim\mathbb{R}^2\).
Ответ: базис \(\mathbb{R}^2\).4.5. Является ли набор базисом (Лаба 1, Задание 3c)
\(\left\{ \begin{bmatrix} 1 \\ 2 \\ 3 \end{bmatrix} \right\}\)
Показать решение
В \(\mathbb{R}^3\) базис из трёх независимых векторов; здесь один — span — прямая.
Ответ: не базис \(\mathbb{R}^3\).4.6. Является ли набор базисом (Лаба 1, Задание 3d)
\(\left\{ \begin{bmatrix} 1 \\ 0 \\ 0 \end{bmatrix}, \begin{bmatrix} 0 \\ 2 \\ 0 \end{bmatrix}, \begin{bmatrix} 0 \\ 0 \\ 3 \end{bmatrix} \right\}\)
Показать решение
Система \(c_1v_1+c_2v_2+c_3v_3=\mathbf{0}\) даёт \(c_1=2c_2=3c_3=0\) — только тривиальное; три вектора в \(\mathbb{R}^3\).
Ответ: базис \(\mathbb{R}^3\).4.7. Является ли набор базисом (Лаба 1, Задание 3e)
\(\left\{ \begin{bmatrix} 1 \\ 0 \\ 0 \end{bmatrix}, \begin{bmatrix} 0 \\ 2 \\ 0 \end{bmatrix} \right\}\)
Показать решение
Span — векторы \((c_1,2c_2,0)\): плоскость \(z=0\), но не всё \(\mathbb{R}^3\).
Ответ: не базис \(\mathbb{R}^3\).4.8. Является ли набор базисом (Лаба 1, Задание 3f)
\(\left\{ \begin{bmatrix} 1 \\ 2 \\ 1 \end{bmatrix}, \begin{bmatrix} 3 \\ 1 \\ 4 \end{bmatrix}, \begin{bmatrix} 5 \\ 5 \\ 6 \end{bmatrix} \right\}\)
Показать решение
Рассмотрим \(A=\begin{bmatrix}1&3&5\\2&1&5\\1&4&6\end{bmatrix}\). Вычисляем: \(\det(A)=1(6-20)-3(12-5)+5(8-1)=-14-21+35=0\) — столбцы линейно зависимы.
Ответ: не базис \(\mathbb{R}^3\) (векторы линейно зависимы).4.9. Разложение вектора (Лекция 1, Пример 1)
Можно ли \(w = \begin{pmatrix} 7 \\ 2 \end{pmatrix}\) представить как линейную комбинацию \(u = \begin{pmatrix} 1 \\ 2 \end{pmatrix}\) и \(v = \begin{pmatrix} 3 \\ 1 \end{pmatrix}\)?
Показать решение
\(c_1u+c_2v=w\) даёт \(c_1+3c_2=7\), \(2c_1+c_2=2\) \(\Rightarrow\) \(c_1=-1/5\), \(c_2=12/5\).
Ответ: да, \(w = -\frac{1}{5}u + \frac{12}{5}v\).4.10. Линейная зависимость (Лекция 1, Пример 2)
Зависим ли \(v_1 = \begin{bmatrix} 1 \\ 2 \end{bmatrix}\), \(v_2 = \begin{bmatrix} 3 \\ 4 \end{bmatrix}\), \(v_3 = \begin{bmatrix} 5 \\ 6 \end{bmatrix}\)?
Показать решение
Есть нетривиальное решение, например \(\alpha_3=1\) даёт \(\alpha_1=1,\alpha_2=-2\).
Ответ: набор линейно зависим.4.11. Подмножество в \(\mathbb{R}^2\) (Лекция 1, Пример 3)
Является ли \(H = \left\{ \begin{bmatrix} t \\ 2t \end{bmatrix} \mid t \in \mathbb{R} \right\}\) (прямая \(y=2x\)) подпространством \(\mathbb{R}^2\)?
Показать решение
- При \(t=0\) получаем \(\mathbf{0}\in H\).
- Сумма векторов вида \((t,2t)\) снова того же вида.
- Умножение на скаляр сохраняет вид \((\alpha t, 2\alpha t)\).
4.12. Линейная независимость (Лекция 1, Пример 4)
Независимы ли \(v_1 = \begin{bmatrix} 1 \\ 0 \end{bmatrix}\), \(v_2 = \begin{bmatrix} 0 \\ 1 \end{bmatrix}\)?
Показать решение
\(\alpha_1 v_1+\alpha_2 v_2=\mathbf{0}\) влечёт \(\alpha_1=\alpha_2=0\).
Ответ: линейно независимы.4.13. Подмножество в \(\mathbb{R}^2\) (Лекция 1, Пример 5)
Является ли \(K = \left\{ \begin{bmatrix} t \\ 2t + 1 \end{bmatrix} \mid t \in \mathbb{R} \right\}\) (прямая \(y=2x+1\)) подпространством \(\mathbb{R}^2\)?
Показать решение
При \(t=0\) вектор \((0,1)\neq\mathbf{0}\); \(\mathbf{0}\notin K\).
Ответ: не подпространство (нет нулевого вектора).4.14. Независимость в \(\mathbb{R}^2\) (Лекция 1, Пример 6)
Независимы ли \(v_1 = \begin{pmatrix} 1 \\ 2 \end{pmatrix}\) и \(v_2 = \begin{pmatrix} 2 \\ 4 \end{pmatrix}\)?
Показать решение
\(v_2=2v_1\); есть нетривиальная комбинация к нулю.
Ответ: линейно зависимы.4.15. Нуль-пространство — подпространство (Лекция 1, Пример 7)
Пусть \(H\) — множество решений однородной системы \(A\mathbf{x}=\mathbf{0}\). Докажите, что \(H\) — подпространство \(\mathbb{R}^n\).
Показать решение
\(A\mathbf{0}=\mathbf{0}\); если \(A\mathbf{u}=A\mathbf{v}=\mathbf{0}\), то \(A(\mathbf{u}+\mathbf{v})=\mathbf{0}\); \(A(\alpha\mathbf{u})=\alpha A\mathbf{u}=\mathbf{0}\).
Ответ: \(H\) — null space матрицы \(A\), всегда подпространство.4.16. Независимость в \(\mathbb{R}^3\) (Лекция 1, Пример 8)
Независимы ли стандартные орты \(e_1,e_2,e_3\) в \(\mathbb{R}^3\)?
Показать решение
Из \(c_1e_1+c_2e_2+c_3e_3=\mathbf{0}\) следует \(c_1=c_2=c_3=0\).
Ответ: линейно независимы.4.17. Описать span (Лекция 1, Пример 9)
Чему равен \(\operatorname{span}\left\{\begin{bmatrix}1\\0\\0\end{bmatrix},\begin{bmatrix}0\\1\\0\end{bmatrix}\right\}\) в \(\mathbb{R}^3\)?
Показать решение
Линейные комбинации дают \((c_1,c_2,0)\) — координатная плоскость \(xy\).
Ответ: плоскость \(z=0\) (все \(\begin{bmatrix}a\\b\\0\end{bmatrix}\)).4.18. Норма вектора (Лекция 1, Пример 10)
Найдите \(||\vec{v}||\) для \(\vec{v} = \begin{bmatrix} 2 \\ 3 \\ 1 \end{bmatrix}\).
Показать решение
\(||\vec{v}||=\sqrt{4+9+1}=\sqrt{14}\).
Ответ: \(\sqrt{14}\).4.19. Расстояние между точками (Лекция 1, Пример 11)
Расстояние между \(P=(1,2,0)\) и \(Q=(3,5,4)\).
Показать решение
\(\sqrt{(3-1)^2+(5-2)^2+(4-0)^2}=\sqrt{29}\).
Ответ: \(\sqrt{29}\).4.20. Единичный вектор (Лекция 1, Пример 12)
Единичный вектор в направлении \(\vec{v} = \begin{bmatrix} 2 \\ 3 \\ 1 \end{bmatrix}\).
Показать решение
\(||\vec{v}||=\sqrt{14}\), \(\vec{u}=\vec{v}/||\vec{v}||\).
Ответ: \(\vec{u} = \begin{bmatrix} 2/\sqrt{14} \\ 3/\sqrt{14} \\ 1/\sqrt{14} \end{bmatrix}\).4.21. Неизвестные координаты (Туториал 1, Задание 1)
Найдите неизвестные координаты, если \(\vec{AB} \cong \vec{CD}\) (равны как свободные векторы).
- \(A(3, 5)\), \(B(4, 6)\), \(C(-2, 5)\), \(D(x, y)\)
- \(A(-1, 1)\), \(B(3, 5)\), \(C(x, y)\), \(D(2x, 1)\)
Показать решение
- \(\vec{AB}=(1,1)\), \(\vec{CD}=(x+2,y-5)\) \(\Rightarrow\) \(x=-1\), \(y=6\).
- \(\vec{AB}=(4,4)\), \(\vec{CD}=(x,1-y)\) \(\Rightarrow\) \(x=4\), \(y=-3\).
4.22. Периметр и средняя линия (Туториал 1, Задание 2)
Вершины \(A(-1,0,0)\), \(B(2,0,\sqrt{7})\), \(C(3,\sqrt{2},\sqrt{7})\). Найдите периметр и вектор средней линии \(AM\) (\(M\) — середина \(BC\)).
Показать решение
\(||\vec{AB}||=4\), \(||\vec{BC}||=\sqrt{3}\), \(||\vec{AC}||=5\); периметр \(9+\sqrt{3}\). Середина \(M=(\frac{5}{2},\frac{\sqrt{2}}{2},\sqrt{7})\), \(\vec{AM}=(\frac{7}{2},\frac{\sqrt{2}}{2},\sqrt{7})\).
Ответ: периметр \(9+\sqrt{3}\); \(\vec{AM}\) как выше.4.23. Операции с векторами (Туториал 1, Задание 3)
\(\vec{u}=(4,-3)\), \(\vec{v}=\vec{AB}\), \(A(2,-1)\), \(B(-1,3)\).
- Точка \(D\): \(\vec{AD}\) — представитель \(\vec{u}+\vec{v}\).
- Скаляр \(c\): \(\vec{u}+c\vec{v}=(1,1)\).
- \(||\vec{u}-2\vec{v}||\).
Показать решение
\(\vec{v}=(-3,4)\); \(\vec{u}+\vec{v}=(1,1)\) \(\Rightarrow\) \(D=(3,0)\); \(c=1\); \(||\vec{u}-2\vec{v}||=\sqrt{221}\).
Ответ: \(D=(3,0)\), \(c=1\), норма \(\sqrt{221}\).4.24. Зависимость и независимость (Туториал 1, Задание 4)
Покажите:
- \((1,2)\) и \((3,6)\) — зависимы;
- \((1,2)\) и \((-1,2)\) — независимы;
- три вектора в \(\mathbb{R}^2\) — зависимы.
Показать решение
\((3,6)=3(1,2)\); для пары \((-1,2)\) — только тривиальное решение; в \(\mathbb{R}^2\) любые 3 вектора зависимы (или явная комбинация).
4.25. Пространство многочленов (Туториал 1, Задание 5)
Докажите, что \(P_n\) — векторное пространство; что с непрерывными функциями?
Показать решение
Нуль — нулевой многочлен; степень суммы \(\le\max\) степеней; \(\alpha p\) снова в \(P_n\). Непрерывные функции: нуль, сумма и произведение на скаляр сохраняют непрерывность.
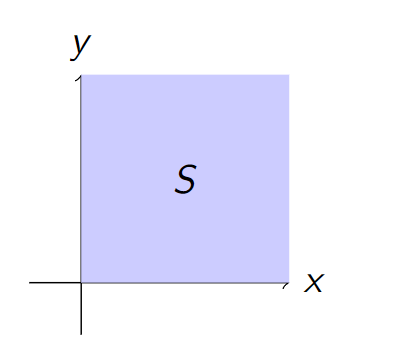
4.26. Первый квадрант — не пространство (Туториал 1, Задание 6)
\(S=\{[x,y]^T\in\mathbb{R}^2\mid x\ge0,y\ge0\}\). Покажите, что \(S\) не векторное пространство.
Показать решение
\((1,1)\in S\), но \((-1)(1,1)\notin S\) — нет замкнутости по умножению на скаляр.
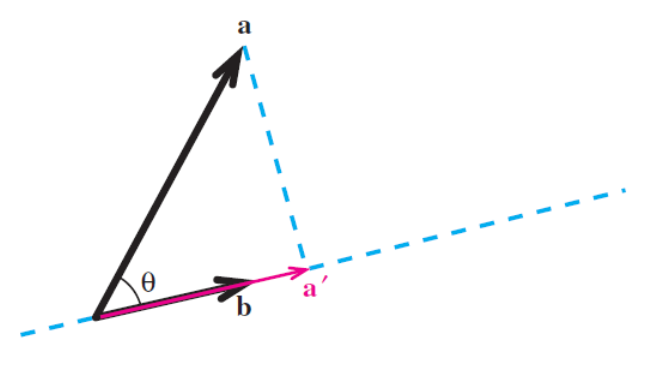
Ответ: не векторное пространство.4.27. Проекция вектора (Туториал 1, Задание 7)
По рисунку выразите \(\vec{a'}\) через \(\vec{a}\) и \(\vec{b}\).
Показать решение
\(\vec{a'}\) — ортогональная проекция \(\vec{a}\) на прямую по \(\vec{b}\): \(\vec{a'}=\bigl(\frac{\vec{a}\cdot\vec{b}}{||\vec{b}||^2}\bigr)\vec{b}\).
4.28. Отражение вектора (Туториал 1, Задание 8)
По рисунку выразите \(\vec{a''}\) через \(\vec{a}\) и \(\vec{b}\).
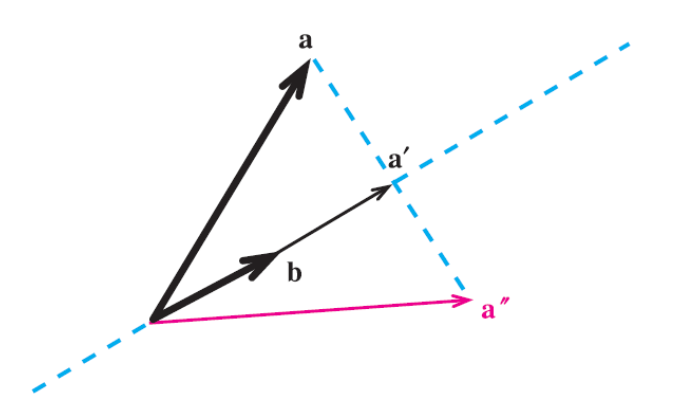
Показать решение
\(\vec{a''}=2\vec{a'}-\vec{a}=2\,\text{proj}_{\vec{b}}\vec{a}-\vec{a}\).
4.29. Норма и параметр (Домашнее задание 1, Задание 1)
\(\mathbf{a}=[2,x]^T\), \(\mathbf{b}=[1,1]^T\), \(\mathbf{c}=[x,3]^T\). Найдите \(x\), если \(\mathbf{v}=\mathbf{a}-\mathbf{b}+\mathbf{c}\) и \(||\mathbf{v}||=\sqrt{13}\).
Показать решение
\(\mathbf{v}=[1+x,x+2]^T\), \(||\mathbf{v}||^2=(1+x)^2+(x+2)^2=13\) \(\Rightarrow\) \(x\in\{1,-4\}\).
Ответ: \(x\in\{1,-4\}\).4.30. Условие базиса в \(\mathbb{R}^3\) (Домашнее задание 1, Задание 2)
При каких \(x\) векторы \(\mathbf{a}=[1,x,3]^T\), \(\mathbf{b}=[2,1,1]^T\), \(\mathbf{c}=[3,2,4]^T\) образуют базис \(\mathbb{R}^3\)?
Показать решение
\(\det(A)=-5x+5\neq0\) \(\Rightarrow\) \(x\neq1\).
Ответ: все вещественные \(x\neq1\).4.31. Проекция и отражение (Домашнее задание 1, Задание 7)
\(\mathbf{a}=(2,2,-1)\), \(\mathbf{b}=(0,4,3)\). Найдите проекцию \(\mathbf{a}\) на \(\mathbf{b}\) и отражение \(\mathbf{a}\) относительно прямой по \(\mathbf{b}\).
Показать решение
\(\mathbf{a}\cdot\mathbf{b}=5\), \(||\mathbf{b}||^2=25\) \(\Rightarrow\) \(\mathbf{a}'=(0,\frac{4}{5},\frac{3}{5})\); \(\mathbf{a}''=2\mathbf{a}'-\mathbf{a}=(-2,-\frac{2}{5},\frac{11}{5})\).
Ответ: \(\mathbf{a}'\) и \(\mathbf{a}''\) как выше.